
| UAS Videos, Terrain Extraction Publications & Regulations |

|
Videos
The videos below show catapult launches and manual landings of the BAT. The BAT is capable of autonomous landing, but for more precise control, we generally prefer manual landings through RC control.
|
Catapult launch in 2009
|
|
Catapult launch in 2010
|
|
Fly-by
|
|
Manual landing
|
|
Manual landing on a very windy day on a narrow road |
Terrain Extraction
Because the UAS imagery is acquired in stereo, we can extract terrain models or digital surface models (DSM) from the imagery. We are currently evaluating products at two levels of details: a coarser terrain model at 1-2m resolution, which reflects the general terrain, and a dense DSM based on a 3D point cloud extracted at the pixel level, which has potential for deriving vegetation heights.
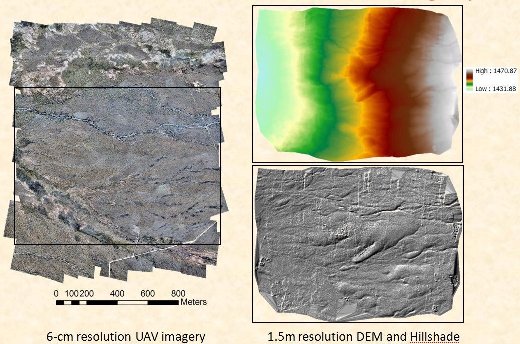
UAS image mosaic (left), digital terrain model (top right), hillshade (bottom right).
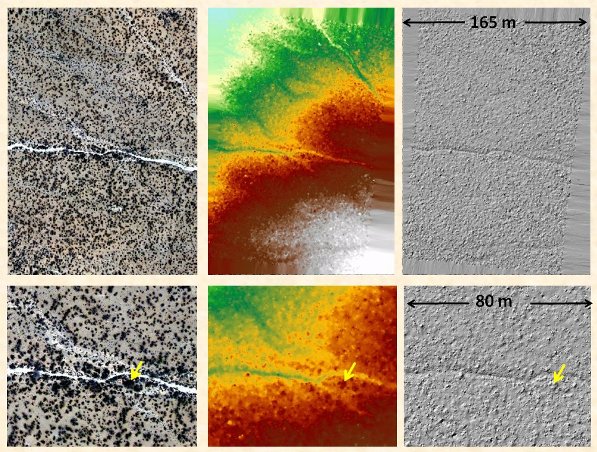
Portion of UAS image mosaic (left), dense digital surface model derived from 3D point cloud (middle), and hillshade (right). The yellow arrow points to a shrub visible in the DSM and hillshade.
3D visualization of the 3D point cloud extracted from stereo UAS imagery over an 80m x 80m area.
Related Publications
 Comis, D., D. O'Brien, Agricultural Research Service Information Staff. Photographing Land Changes From Low in the Sky. Rangelands Are Ready for Their Close-Up. Agricultural Research Magazine, September 2011 - Vol. 59, No. 8.
Comis, D., D. O'Brien, Agricultural Research Service Information Staff. Photographing Land Changes From Low in the Sky. Rangelands Are Ready for Their Close-Up. Agricultural Research Magazine, September 2011 - Vol. 59, No. 8.
- Laliberte, A.S., M.A. Goforth, Steele, C.M., and A. Rango. 2011. Multispectral Remote Sensing from Unmanned Aircraft: Image Processing Workflows and Applications for Rangeland Environments. Remote Sensing 3:2529-2551.
- Laliberte, A.S., and A. Rango. 2011. Image processing and classification procedures for analysis of sub-decimeter imagery acquired with an unmanned aircraft over arid rangelands. GIScience and Remote Sensing 48(1):4-23, Special Issue on UAV-Driven Research and Applications.
- Laliberte, A.S., C. Winters, and A. Rango. 2011. UAS remote sensing missions for rangeland applications. Geocarto International 26(2):141-156, Special Issue on UAS in Remote Sensing.
- Laliberte, A.S., J.E. Herrick, A. Rango, and C. Winters. 2010. Acquisition, orthorectification, and object-based classification of unmanned aerial vehicle (UAV) imagery for rangeland monitoring. Photogrammetric Engineering and Remote Sensing, 76(6):661-672.
- Rango, A., and A.S. Laliberte. 2010. Impact of flight regulations on effective use of unmanned aerial vehicles for natural resources applications. Journal of Applied Remote Sensing 4:043539.
- Laliberte, A.S., and A. Rango. 2009. Texture and scale in object-based analysis of sub-decimeter resolution unmanned aerial vehicle (UAV) imagery. IEEE Transactions on Geoscience and Remote Sensing, Special Issue on UAV Sensing Systems in Earth Observation 47(3):761-770.
- Rango, A., A.S. Laliberte, J.E. Herrick, C. Winters, K. Havstad, C. Steele, and D. Browning. 2009. UAV-based remote sensing for rangeland assessment, monitoring, and management. Journal of Applied Remote Sensing 3(1):033542 Go to top of page
- Laliberte, A.S., and A. Rango. 2008. Incorporation of texture, hue, intensity, and saturation for rangeland monitoring with unmanned aircraft imagery. The International Archives of the Photogrammetry, Remote Sensing, and Spatial Information Sciences: GEOBIA 2008: Pixels, Objects, Intelligence, 6-7 Aug, 2008, Calgary, AB, ISPRS, Vol. No. XXXVIII-4/C1.
- Laliberte, A.S., and A. Rango. 2008. Correlation of object-based texture measures at multiple scales in sub-decimeter resolution aerial photography. The International Archives of the Photogrammetry, Remote Sensing, and Spatial Information Sciences: GEOBIA 2008: Pixels, Objects, Intelligence, 6-7 Aug, 2008, Calgary, AB, ISPRS, Vol. No. XXXVIII-4/C1.
- Laliberte, A.S., C. Winters, and A. Rango, 2008. A procedure for orthorectification of sub-decimeter resolution imagery obtained with an unmanned aerial vehicle (UAV). Proceedings of the ASPRS Annual Conference, 28 April - May 2 2008, Portland, Oregon.
- Laliberte, A.S., A. Rango, and J.E. Herrick. 2007. Unmanned aerial vehicles for rangeland mapping and monitoring: a comparison of two systems. Proceedings of the ASPRS Annual Conference, May 7-11, Tampa, FL.
- Rango, A., A.S. Laliberte, C. Steele, J.E. Herrick, B. Bestelmeyer, T. Schmugge, A. Roanhorse, and V. Jenkins, 2006. Using unmanned aerial vehicles for rangelands: current applications and future potentials. Environmental Practice, 8:159-168.
{kind=link}
For more information, please contact Albert Rango alrango@nmsu.edu or Andrea S. Laliberte andrea.laliberte@earthmetrics.com.
FAA Regulations
Unmanned aircraft operation in the National Airspace (NAS) fall under the jurisdiction of the Federal Aviation Administration (FAA). Public entities (local, state and federal agencies) have to apply for a Certificate of Authorization (COA); civil entities require a Special Airworthiness Certificate (SAC). The COA provides guidelines for operator qualifications, airworthiness, aircraft maintenance, flying altitudes, communication with air traffic control, visual line of sight, and visual observer requirements.
Current regulations limit UAS flights to visual line of sight, even though many UAS are capable of operating autonomously for several hours and at large distances to the ground station. These regulations impose result in limitations for the size of area that can be mapped and in additional crew training costs. Personnel have to be trained in the safe operation of the UAS and have to fulfill requirements for private pilot ground school and/or private pilot licensing, and FAA medical certification. UAS regulations are subject to continuous review and are updated as required. The FAA maintains a website with the latest UAS regulations and policies at http://www.faa.gov/about/initiatives/uas/cert/.
Operating a UAS under a COA The Jornada Experimental Range UAS is trained in all UAS operations and fulfills the FAA requirements for operating a UAS in the NAS. Two of our team members hold private pilot licenses. According to regulations, our missions are conducted within visual range of the UAS, which means a limit of about ? mile horizontal distance at our flying height of 700 ft above ground.
We work closely with New Mexico State University's UAS Flight test center, which has a COA for southern New Mexico. At the Jornada Experimental Range field station, we operate under this COA. We also obtained a COA for a remote sensing mission at the USDA ARS Reynolds Creek Experimental Watershed site in southwestern Idaho, where we flew the UAS over three sites and acquired over 800 images. Because portions of the JER field station are located in restricted airspace, we also operate the UAS in military airspace controlled by the adjacent White Sands Missile Range.